











QR Code

Chi siamo
Prodotti
Contattaci

Telefono

E-mail

Indirizzo
N. 22, Hongyuan Road, Guangzhou, provincia del Guangdong, Cina

Con il continuo sviluppo della tecnologia di produzione intelligente, l'applicazione di linee di produzione automatizzata nel campo della produzione di acciaio magnetico sta diventando sempre più diffusa. Tuttavia, i tradizionali metodi di caricamento manuale e scarico hanno problemi come bassa efficienza, qualità instabile e significativi pericoli per la sicurezza, che non sono più in grado di soddisfare le esigenze della produzione moderna. In risposta a questi problemi, proponiamo una soluzione per l'utilizzo di robot compositi intelligenti Fuwei per il carico e lo scarico in acciaio magnetico, mirando a migliorare l'efficienza della produzione, ridurre i costi di manodopera, garantire la sicurezza operativa e raggiungere l'automazione e l'intelligenza nella produzione di acciaio magnetico.
Punti deboli del settore:
1. Alta dipendenza dal funzionamento manuale porta a bassa efficienza di produzione e qualità instabile;
2. Ci sono pericoli per la sicurezza durante il processo operativo, come incidenti come pizzicamento e impatto;
3. Il cattivo ambiente di lavoro rappresenta una potenziale minaccia per la salute degli operatori;
4. L'operazione manuale è difficile soddisfare le esigenze di produzione su larga scala e ad alta efficienza.

Panoramica delle esigenze e delle soluzioni dei clienti
Richiesta dei clienti: il cliente spera di ottenere caricamento automatico e scarico di acciaio magnetico attraverso il robot composito intelligente Fuwei, migliorando l'efficienza della produzione e la stabilità di qualità. I requisiti specifici includono il completamento del caricamento e lo scarico di due tipi di prodotti, con un tempo di ciclo di circa 80 secondi per completare il carico di due pile di prodotti e avere requisiti di alta precisione.
Panoramica della soluzione
Proponiamo il seguente piano di ristrutturazione per soddisfare le esigenze dei nostri clienti:
1. Sostituire il controller del motore e del servo per migliorare le prestazioni e la stabilità del robot;
2. Dotato di navigazione radar, strisce di luce e altoparlanti per migliorare la navigazione autonoma, la visibilità e l'interattività del robot;
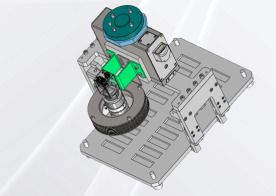
3. Progettare pinze personalizzate che integrano telecamere e sensori per ottenere un'identificazione precisa e afferrare l'acciaio magnetico;
4. Ottimizzare la configurazione del layout e dell'attrezzatura delle aree di caricamento e scarico per garantire che i robot possano completare in modo accurato ed efficiente il proprio lavoro.
4 、 Implementazione dettagliata del piano di ristrutturazione
Trasformazione di robot composito

Selezionare motori e controller a prestazioni ad alte prestazioni per garantire l'accuratezza e la stabilità del movimento robot;
Dotato di navigazione radar per raggiungere il posizionamento autonomo e la pianificazione del percorso dei robot;
Installare strisce di luce a LED e altoparlanti di allarme per migliorare la visibilità e l'interattività del robot;
Progetta pinze personalizzate che integrano telecamere e sensori per ottenere un'identificazione precisa e una presa in acciaio magnetico.
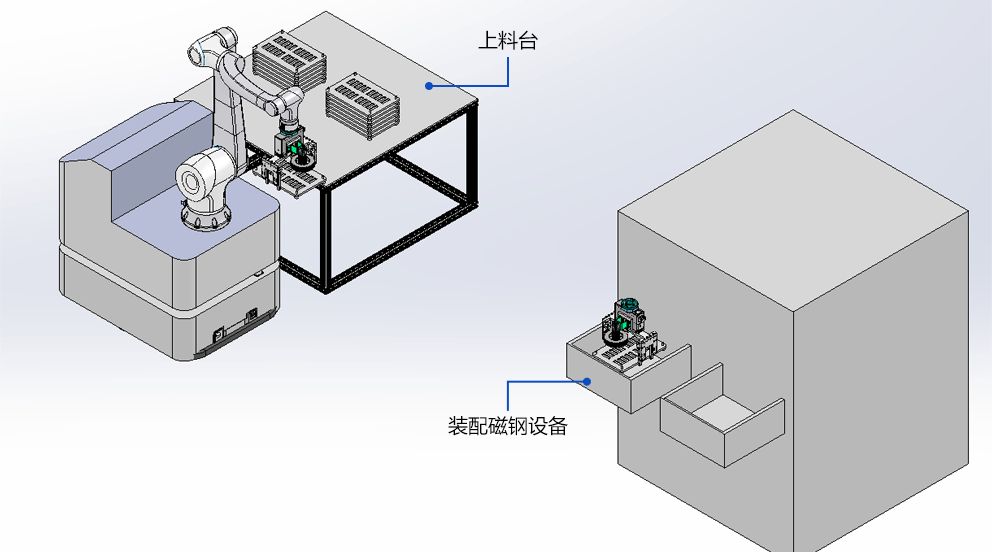
Ottimizzazione dell'area di carico
Slot di guida del design per guidare l'acciaio magnetico in posizioni designate;
Imposta marcatori di posizionamento desktop per facilitare il riconoscimento e il posizionamento dei robot di punti di presa.
Rinnovamento dell'area di scarico
Impostare il segno di posizionamento del dispositivo per garantire che il robot posiziona accuratamente l'acciaio magnetico;
Installare le porte del pannello di controllo elettrico e le fessure scorrevoli di controllo elettrico per proteggere gli operatori dalle lesioni e ottenere l'espulsione automatizzata delle apparecchiature.
Logica di esecuzione e ottimizzazione del processo
La logica di esecuzione dell'intera soluzione si basa sulla progettazione del processo delle linee di produzione automatizzate, garantendo la continuità e l'efficienza del flusso di lavoro. L'intero processo è attivato da una richiesta di caricamento e il robot esegue operazioni di recupero dei materiali in base al fatto che l'area di caricamento sia pronta. Durante il processo di raccolta e posizionamento dei materiali, il riconoscimento preciso e il controllo della forza vengono raggiunti attraverso telecamere e sensori integrati nella pinza. Una volta che il magnete viene inserito correttamente sull'apparecchiatura, il robot confermerà il completamento del caricamento e procederà al ciclo successivo.
Utilizzando il robot composito intelligente Fuwei per il carico e lo scarico in acciaio magnetico, possiamo risolvere efficacemente i problemi dei tradizionali metodi di carico manuale e scarico, migliorare l'efficienza della produzione, ridurre i costi di manodopera e garantire la sicurezza operativa. Allo stesso tempo, questa soluzione ha anche un'alta scalabilità e flessibilità, che possono adattarsi alle imprese di produzione in acciaio magnetico di diverse scale e esigenze di produzione.
N. 22, Hongyuan Road, Guangzhou, provincia del Guangdong, Cina
