











QR Code

Chi siamo
Prodotti
Contattaci

Telefono

E-mail

Indirizzo
N. 22, Hongyuan Road, Guangzhou, provincia del Guangdong, Cina

Slam , noto anche come posizionamento sincrono e costruzione della mappa, è una tecnologia di base cruciale nel campo della tecnologia dei robot mobili. Consente ai robot di stimare contemporaneamente la propria posizione e costruire mappe ambientali in ambienti sconosciuti, che è la chiave per raggiungere la navigazione e l'esplorazione autonome.
1 、 Principio della tecnologia Slam
L'idea fondamentale della tecnologia SLAM è quella di ottenere la localizzazione di sé e mappare la costruzione di robot in ambienti sconosciuti attraverso la fusione e l'elaborazione dei dati del sensore (come LIDAR, telecamere, ecc.). In particolare, la tecnologia SLAM è costituita da due parti principali: odometria frontale e ottimizzazione del back-end.
1. Contachilometri front -end: questa sezione è principalmente responsabile della stima della traiettoria di movimento del robot attraverso i dati del sensore. Calcola lo spostamento relativo e la trasformazione dell'atteggiamento del robot analizzando le variazioni dei dati del sensore in punti temporali consecutivi. I metodi comuni includono l'abbinamento delle caratteristiche, il flusso ottico, ecc. L'output del contachilometri front-end è una stima preliminare della posa del robot, ma a causa del rumore del sensore e degli errori accumulati, questi risultati della stima spesso non sono abbastanza accurati.
2. Ottimizzazione del backend: al fine di migliorare l'accuratezza del posizionamento e la coerenza della mappa, SLAM Technology introduce un processo di ottimizzazione del back -end. Questa sezione utilizza dati storici, rilevamento del loop e altri metodi per calibrare e ottimizzare i risultati del contachilometri front-end. I metodi di ottimizzazione comunemente usati includono metodi basati sul filtro (come filtro Kalman esteso, filtro delle particelle, ecc.) E metodi di ottimizzazione basati su grafici. Questi metodi possono effettivamente ridurre gli errori cumulativi e migliorare l'accuratezza del posizionamento dei robot e della costruzione di mappe.
3 、 L'applicazione della tecnologia SLAM nei robot mobili
La tecnologia SLAM, in quanto una delle tecnologie principali dei robot mobili, ha ampie prospettive di applicazioni in più campi. Ecco diversi casi di applicazione tipici:
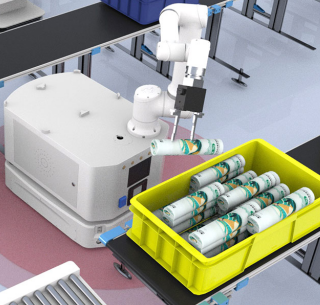
1. Navigazione autonoma: nei campi di deposito e logistica, lavorazione, ecc., I robot mobili devono ottenere funzioni di navigazione autonome. Utilizzando la tecnologia SLAM, i robot possono percepire l'ambiente circostante in tempo reale e costruire mappe, pianificando così il percorso ottimale e dirigendosi autonomamente nella posizione target. Ciò migliora notevolmente l'efficienza del lavoro e l'autonomia dei robot.
2. Esplorazione e modellazione ambientale: in ambienti sconosciuti, i robot mobili possono utilizzare la tecnologia SLAM per l'esplorazione e la modellazione ambientale. Raccogliendo continuamente i dati dei sensori e aggiornando le informazioni sulla mappa.
3. Interazione per macchine umane e servizi intelligenti: con il continuo sviluppo della tecnologia di intelligenza artificiale, i robot mobili vengono sempre più applicati nei campi dell'interazione delle macchine umane e dei servizi intelligenti. Utilizzando la tecnologia SLAM per ottenere un posizionamento preciso e un riconoscimento della scena, i robot possono offrire agli utenti un'esperienza di servizio più personalizzata e intelligente. Ad esempio, guidare i clienti nei centri commerciali e gli anziani di accompagnamento a casa hanno ampie prospettive di applicazione.
La tecnologia SLAM, in quanto una delle tecnologie principali dei robot mobili, fornisce un forte supporto per il raggiungimento della navigazione autonoma e dell'esplorazione ambientale. Allo stesso tempo, di fronte a scenari di applicazione complessi e in continua evoluzione e di potenziamento costante delle richieste degli utenti, dobbiamo anche continuare a prestare attenzione e ricercare nuove tecnologie e metodi SLAM per promuovere l'ulteriore sviluppo e l'applicazione della tecnologia dei robot mobili.
N. 22, Hongyuan Road, Guangzhou, provincia del Guangdong, Cina
