










QR Code

Chi siamo
Prodotti
Contattaci

Telefono

E-mail

Indirizzo
N. 22, Hongyuan Road, Guangzhou, provincia del Guangdong, Cina

Panoramica del progetto
Questo progetto mira a progettare un sistema di ricarica automatico e efficiente e stabile per soddisfare le esigenze di ricarica dei clienti in condizioni di produzione interna nella regione di Shanxi. Il sistema deve raggiungere il funzionamento senza pilota e il controllo dei veicoli ingegneristici, completando solo le funzioni di gestione e di ricarica automatiche dei punti A e B per soddisfare i requisiti di funzionamento continuo della linea di produzione.
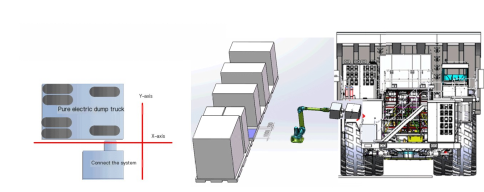
composizione del sistema
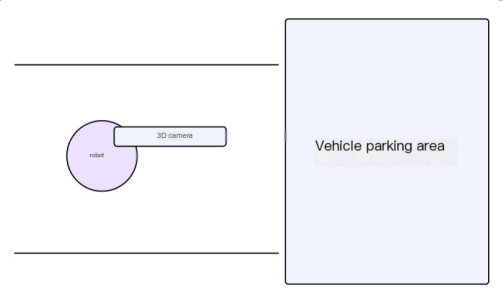
Sistema di posizionamento visivo: utilizzo di telecamere ad alta precisione e algoritmi visivi per ottenere un posizionamento preciso della porta di ricarica su camion di dump. Il sistema visivo deve avere la capacità di resistere alla polvere e alla luce solare diretta, garantendo un funzionamento stabile in vari ambienti interni.
Robot e meccanismi di spinta delle pistole: i robot industriali con armato di braccio di 3 m o più sono selezionati, dotati di meccanismi di spinta delle armi appositamente progettati. Il meccanismo di spinta della pistola dovrebbe avere una spinta e una precisione sufficienti per garantire che la pistola di ricarica possa essere inserita con precisione e rapidamente nella porta di ricarica.
Sistema di ricarica: dotato di attrezzature di ricarica ad alta potenza di 3 megawatt, garantendo che il cassonetto possa essere completamente carico in un breve periodo di tempo e migliorando l'efficienza della produzione.
Sistema di controllo: attraverso un sistema di controllo integrato, è possibile ottenere un controllo preciso del posizionamento visivo, del movimento dei robot e del processo di ricarica. Il sistema di controllo dovrebbe avere un'elevata automazione e caratteristiche di intelligenza ed essere in grado di ottenere una ricarica automatica senza pilota.
Flusso di lavoro
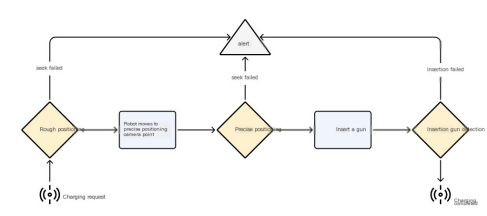
Posizionamento autonomo autonomo: identificare e individuare la posizione della porta di ricarica del cassonetto attraverso un sistema di posizionamento visivo.
Robot Motion: il sistema di controllo guida il robot per muoversi vicino alla porta di ricarica del cassonetto in base ai risultati del posizionamento visivo.
Inserzione delle armi da spinta: il robot è dotato di un meccanismo di pistola che spinge, che inserisce con precisione e rapidamente la pistola di ricarica nella porta di ricarica del cassonetto.
Processo di ricarica: il sistema di ricarica inizia a ricaricare il cassonetto fino a raggiungere il livello di potenza o il tempo preimpostati.
Evacuazione del robot: dopo il completamento della ricarica, il robot evacuerà la porta di ricarica e attende l'arrivo del prossimo cassonetto.
tecnologia chiave
Tecnologia di posizionamento visivo: utilizzando algoritmi come l'apprendimento profondo, l'accuratezza e la stabilità dei sistemi di posizionamento visivo possono essere migliorati.
Tecnologia di controllo dei robot: ottimizzare la traiettoria e la velocità del movimento robot per migliorare l'efficienza di ricarica.
Progettazione del meccanismo di spinta della pistola: assicurarsi che il meccanismo di spinta della pistola abbia una spinta e una precisione sufficienti, considerando la sua compattezza strutturale e affidabilità.
Risposta al rischio
Protezione ambientale interna: garantire un ambiente interno pulito e secco, ridurre l'impatto della polvere e la luce solare diretta sul sistema di posizionamento visivo.
Manutenzione hardware: mantenere e manutenzione regolarmente hardware come robot e sistemi di posizionamento visivo per garantire il loro normale funzionamento.
Valutazione professionale: invitare i professionisti a valutare e ottimizzare il meccanismo di spinta della pistola, il sistema di ricarica, ecc., Per garantire la sicurezza e la fattibilità della soluzione.
N. 22, Hongyuan Road, Guangzhou, provincia del Guangdong, Cina
