











QR Code

Chi siamo
Prodotti
Contattaci

Telefono

E-mail

Indirizzo
N. 22, Hongyuan Road, Guangzhou, provincia del Guangdong, Cina

Sfondo del progetto
Con il continuo sviluppo del commercio globale, il trasporto di container è diventato una delle principali modalità di logistica internazionale. Al fine di migliorare l'efficienza del carico e dello scarico del contenitore, ridurre i costi del lavoro e garantire la sicurezza delle merci, Fuwei Intelligent ha progettato e implementato una serie di progetti di test del contenitore robot composito in base ai requisiti dei clienti, mirando a verificare la fattibilità, la stabilità e l'efficienza dei robot nelle operazioni del contenitore e aiutare i clienti a raggiungere la riduzione dei costi e l'improvvisazione dell'efficienza.
Obiettivi del progetto
L'obiettivo principale di questo progetto è valutare le prestazioni dei robot compositi nel caricamento e allo scarico, alla manipolazione, alla movimentazione, alla palletizzazione e ad altri aspetti e valutare le loro prestazioni negli ambienti di lavoro reali.

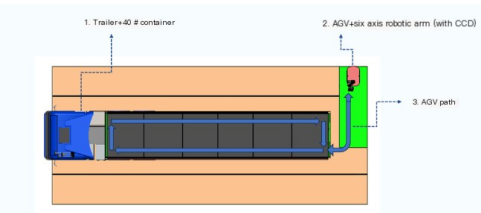
Introduzione al sistema robot composito
Il sistema di robot composito utilizzato in questo progetto combina un braccio robotico, un AGV (veicolo guidato automatizzato) e un sistema di controllo intelligente, con funzioni come navigazione autonoma, posizionamento preciso e funzionamento flessibile. Il braccio robotico è responsabile della presa e del posizionamento di merci all'interno del contenitore, l'AGV è responsabile del movimento e del posizionamento del robot e il sistema di controllo intelligente è responsabile della pianificazione complessiva delle attività e del coordinamento.
Testare il contenuto e i metodi
Test di funzionamento del braccio robot: testare l'accuratezza, la velocità e la stabilità del braccio del robot in un ambiente contenitore simulato. Osservare l'adattabilità e l'efficienza operativa del braccio robotico impostando dimensioni, forme e pesi di merci diverse.
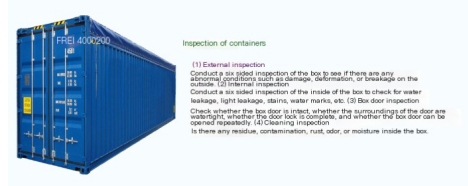
Test di AGV Mobile e posizionamento: testare la navigazione autonoma, l'evitamento degli ostacoli, l'accuratezza del posizionamento dell'AGV e altre funzioni in un ambiente di cantiere contenitore. Impostando percorsi e ostacoli diversi, verificare la stabilità e l'affidabilità di AGV negli ambienti di lavoro effettivi.
Test di collegamento del sistema integrato: collegare il braccio robotico con AGV per simulare i processi di caricamento, scarico, gestione e pallettizzazione del contenitore effettivo. Valutare la capacità di collaborazione e l'efficienza collaborativa del sistema complessivo impostando diversi scenari di attività e requisiti ritmici.
Dopo più round di test, il robot composito ha funzionato bene in
N. 22, Hongyuan Road, Guangzhou, provincia del Guangdong, Cina
