











QR Code

Chi siamo
Prodotti
Contattaci

Telefono

E-mail

Indirizzo
N. 22, Hongyuan Road, Guangzhou, provincia del Guangdong, Cina

1 、 Panoramica del progetto
Questo piano mira a personalizzare un sistema di piattaforma di pratica dell'istruzione robot per soddisfare le esigenze di insegnamento di un laboratorio universitario in visione macchina e del controllo della forza. Il sistema sarà sviluppato attorno al robot collaborativo AUBO-I5, alla fotocamera industriale HikVision, alla fotocamera 3D e al sensore di forza a sei assi per ottenere funzioni come il controllo dei robot, l'ispezione visiva e il gruppo di controllo della forza e fornire software al computer superiore open source per l'espansione funzionale successiva.

2 、 composizione hardware di sistema
Robot: adottare il robot collaborativo AUBO-I5, ha le caratteristiche di alta precisione e alta sicurezza ed è adatto agli scenari di insegnamento.
Camera: compresa la fotocamera industriale HikVision e la fotocamera 3D, utilizzata per ottenere informazioni sull'immagine dei pezzi, supportando l'elaborazione tradizionale delle immagini e il rilevamento delle immagini di apprendimento profondo.
Sensore di forza a sei dimensioni: Kunwei (KWR75) o altri marchi sono selezionati per il monitoraggio in tempo reale delle informazioni sull'interazione della forza tra l'effettore di End Robot e il pezzo.
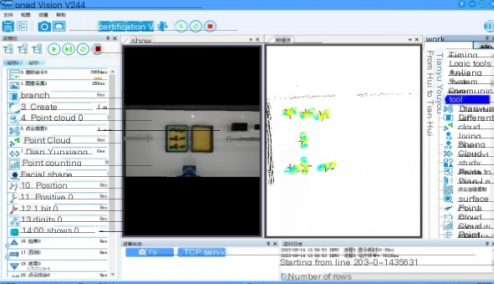
3 、 Progettazione del software per computer superiore
Funzioni di base:
Controllo dei robot: implementare funzioni come connessione, disconnessione, controllo articolare o postura dei robot.
Controllo della fotocamera: implementare funzioni come connessione della fotocamera, disconnessione e acquisizione di immagini.
Display di stato: visualizzazione in tempo reale del giunto del robot e stato di posa, parametri di stato del sensore di forza a sei assi e immagini catturate dalla fotocamera.
Caratteristiche esclusive:
Gruppo foro dell'albero: attraverso il funzionamento del computer superiore, combinato con l'ispezione visiva e la tecnologia di controllo della forza, si ottiene la funzione di assemblaggio automatico del foro dell'albero.
Progettazione dell'interfaccia: l'interfaccia del computer superiore dovrebbe essere concisa, chiara e facile da usare. L'interfaccia dovrebbe includere pulsanti di funzione di base e un'area di visualizzazione dello stato, oltre a fornire accesso alla funzione del gruppo foro dell'albero.
4 、 Implementazione della funzione
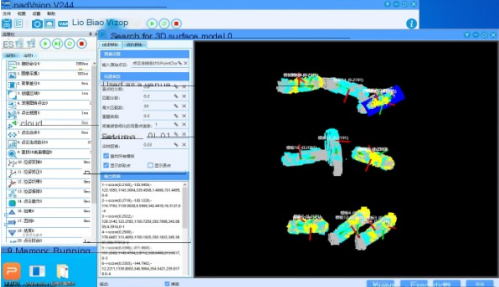
Visione artificiale:
Rilevamento tradizionale delle immagini: utilizzando la corrispondenza del modello, il raccordo del cerchio, il raccordo del bordo e altri metodi per individuare e riconoscere i pezzi, supportando il riconoscimento di codici a barre, codici QR, numeri di caratteri, nonché il calcolo dell'area della scala di grigi e della quantità di piastra.
Rilevamento delle immagini di Deep Learning: riconoscimento automatico e localizzazione dei pezzi attraverso algoritmi di apprendimento profondo. Sebbene il profondo apprendimento richieda ancora un'annotazione manuale delle immagini, ci impegneremo a migliorare l'efficienza dell'allenamento e l'accuratezza del riconoscimento, riducendo gradualmente il carico di lavoro delle annotazioni.
Assemblaggio del controllo di potenza:
Combinando i dati da sensori di forza a sei dimensioni, raggiungi il controllo della forza tra l'effettore dell'estremità del robot e il pezzo e il completamento di un gruppo preciso del foro dell'albero.
5 、 Rischi del progetto e misure di risposta
Rischio di cooperazione con i sensori di forza a sei assi: a causa della mancanza di cooperazione con i sensori di forza a sei assi, potrebbero esserci alcune difficoltà tecniche e incertezze. Organizzeremo un team tecnico professionale per affrontare il problema e garantire l'integrazione regolare e il funzionamento stabile dei sensori.
Rischio di rilevamento delle immagini di apprendimento profondo: il rilevamento delle immagini di apprendimento profondo richiede un certo livello di accuratezza ed efficienza di riconoscimento, soddisfacendo al contempo il requisito di una formazione di un clic. Continueremo a ottimizzare gli algoritmi di apprendimento profondo per migliorare l'accuratezza e l'efficienza del riconoscimento, esplorando al contempo i modi per implementare la formazione a un clic.
6 、 post espansione e cambio di scena
Il software per computer superiore adotta la progettazione open source, che facilita l'espansione funzionale e il cambio di scena secondo necessità nell'insegnamento successivo. Ad esempio, la scena dell'assemblaggio dei fori dell'albero può essere passata a compiti come meshing di ingranaggi pregiati o riconoscimento e afferrare altri pezzi. Modificando e debug di programmi open source, è facile ottenere funzioni di funzionamento del robot e di rilevamento visivo in diversi scenari.
Questo piano integra risorse hardware come robot, telecamere e sensori di forza a sei assi, combinati con la progettazione di software per computer superiori open source, per fornire un ambiente di insegnamento ricco e facilmente espandibile per la piattaforma di pratica dell'istruzione robot. Attraverso l'uso di piattaforme pratiche, gli studenti possono acquisire una comprensione più profonda dei principi e delle applicazioni della visione macchina e della tecnologia di controllo della forza e migliorare le loro capacità pratiche e innovative.
N. 22, Hongyuan Road, Guangzhou, provincia del Guangdong, Cina
